Overview
The YARI F10N GNSS is an all-in-one positioning and navigation module designed for Pixhawk and ArduPilot systems. It integrates a u-blox NEO-F10N standard-precision, multi-constellation, dual-band GNSS (L1 + L5) receiver together with an onboard magnetometer, barometer, IMU, safety switch, buzzer, and status LEDs, all accessible over DroneCAN. With support for GPS, Galileo, BeiDou and NAVIC (India’s IRNSS), the module delivers improved accuracy, faster convergence, and superior robustness in urban, high-interference, or low-elevation environments making it highly versatile for UAVs, robotics platforms, and mapping applications requiring reliable GNSS performance and integrated sensing.
Key Highlights
- GNSS Receiver: u-blox NEO-F10N standard precision dual-band (L1 + L5) positioning with meter-level accuracy (up to 0.7 m), with concurrent GPS, Galileo, BeiDou NAVIC (IRNSS) - ensuring expanded coverage and higher reliability for users in India. Includes anti-jamming/spoofing features and RF interference mitigation.
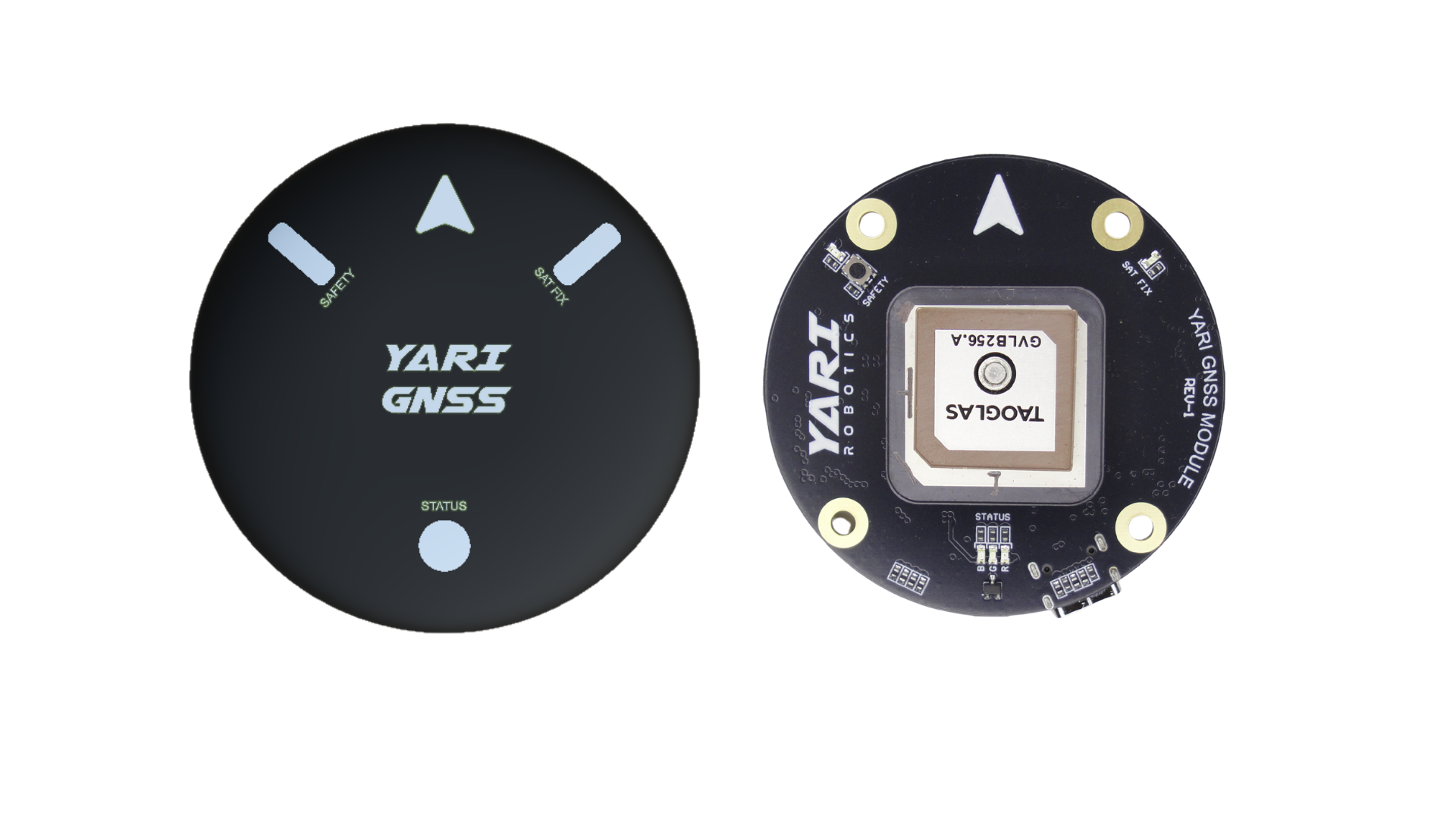
- Antenna: Taoglas ceramic patch antenna, compact 25 × 25 × 6 mm footprint, optimized for L1 and L5 bands, providing reliable signal quality in challenging environments.
- Enhanced RF Front End: The F10N’s internal RF chain uses an L1/L5 dual-band diplexer SAW filter, LNA, and second-stage SAW filtering, plus an LTE Band 13 notch filter on L1. This SAW–LNA–SAW architecture with built-in LTE suppression rejects out-of-band signals and boosts GNSS sensitivity without requiring external RF components.
- Integrated sensors: iSentek IST8310 magnetometer, InvenSense ICP-20100 barometer, InvenSense ICM-42688-P 6-axis IMU
- DroneCAN peripheral firmware (open source): Plug-and-play operation with Pixhawk, Cube, Durandal, and any DroneCAN-compatible flight controller.
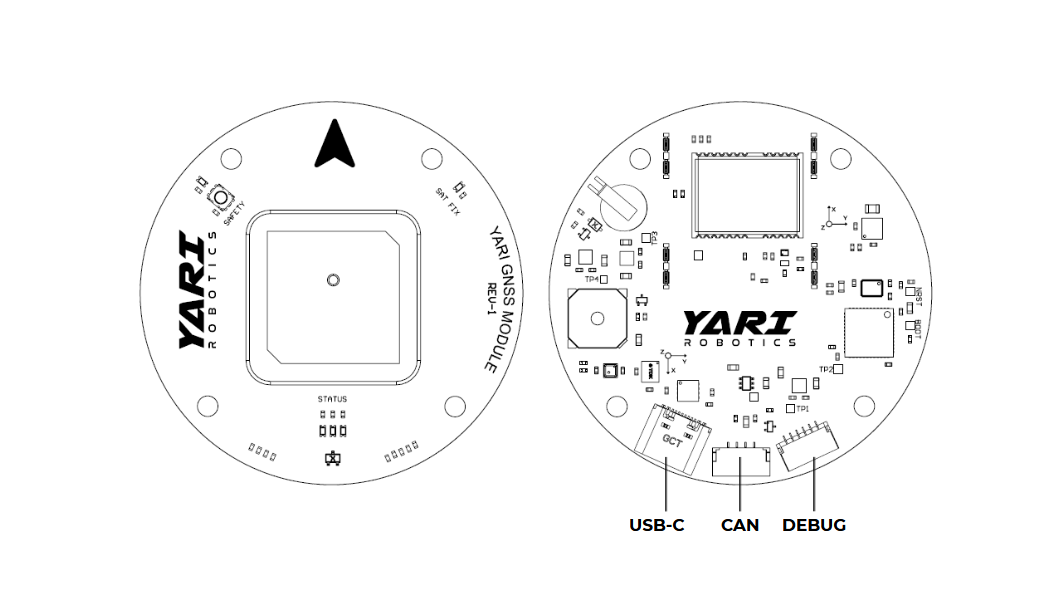
- Built-in safety & feedback: Tactile safety button, buzzer, and multiple status LEDs (sat-fix, system status, safety).
- USB-C port: Direct u-center access without opening the enclosure.
- Standard Pixhawk connectors: 1× CAN (4-pin JST-GH), 1× Debug (6-pin JST-SH), 1× USB-C
Technical Specifications
| Sensors and Processing | |
|---|---|
| GNSS Receiver | u-blox NEO-F10N |
| Antenna | Taoglas GVLB256.A |
| Magnetometer | iSentek IST8310 |
| Barometer | InvenSense ICP-20100 |
| IMU | InvenSense ICM-42688-P (6-axis) |
| MCU | STM32F412CEU6 |
| Indicators | Safety LED, GNSS Sat-Fix LED, RGB Status LED |
| Built-ins | Safety switch and buzzer |
| Interfaces | |
| DroneCAN | 1 × Pixhawk Standard CAN (4-pin JST-GH) |
| Debug | 1 × Pixhawk Standard Debug (6-pin JST-SH) |
| USB | 1 × USB-C for u-center configuration |
| Electrical and Environmental | |
| Supply Voltage | 5 V |
| Current | 110 mA average, 117 mA max |
| Operating Temperature | −25 to +85 °C |
| Mechanical | |
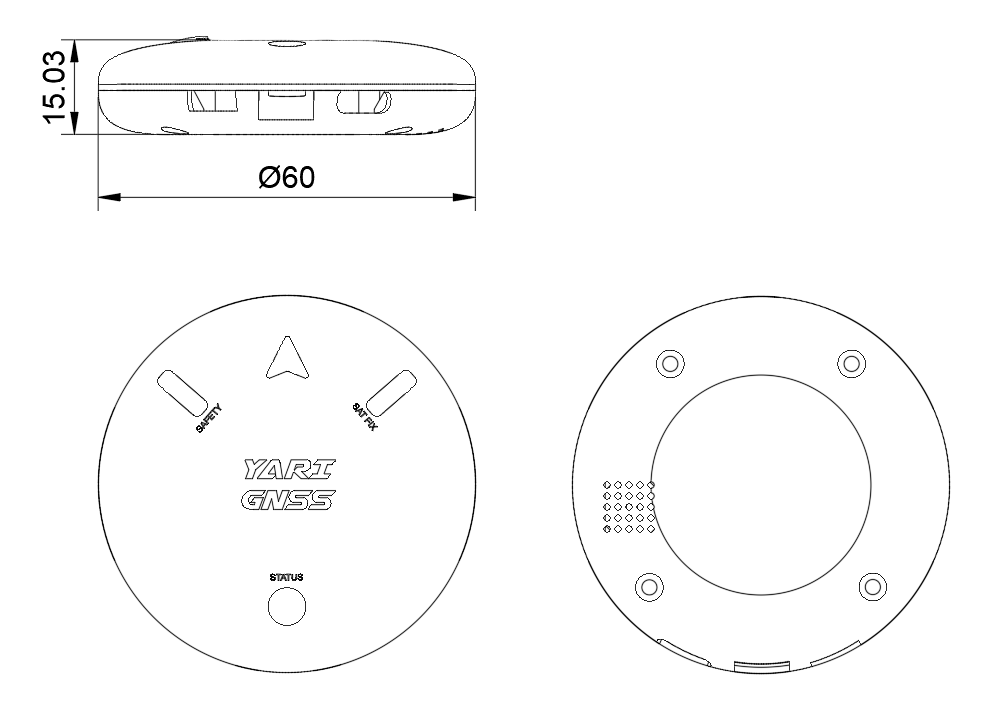
| Dimensions | 60 mm × 60 mm × 15 mm |
| Weight | 30 g |
| Other | |
| Country of Origin | India 🇮🇳 |
GNSS Performance & Bands
| Position accuracy (best) | up to 0.7 m |
| Horizontal accuracy | 2.0 m |
| Speed accuracy | 0.05 m/s |
| Navigation update rate | up to 25 Hz |
| Acquisition | Cold start: 24 s Hot start: 2 s Aided start: 2 s |
| Tracked satellites | 22+ |
| Sensitivity | Tracking: −167 dBm Cold/hot start: −148 dBm Reacquisition: −160 dBm |
| Frequency bands | GPS: L1 C/A + L5 Galileo: E1 B/C + E5a BeiDou: B1C + B2a NavIC: L5 |
The u-blox NEO-F10N GNSS receiver does not support the GLONASS constellation.
It supports GPS, Galileo, BeiDou, and NAVIC (IRNSS), but GLONASS is not available on this chipset.
- NAVIC cannot operate standalone — per u-blox documentation, the F10N requires an L1-band constellation (e.g., GPS) to provide timing support.
- NAVIC is disabled by default in the standard firmware (
SPGL1L56.00). It must be explicitly enabled through configuration. - Band-level control is not supported — you cannot independently select L1/L5 per constellation. Only whole constellations can be enabled or disabled.
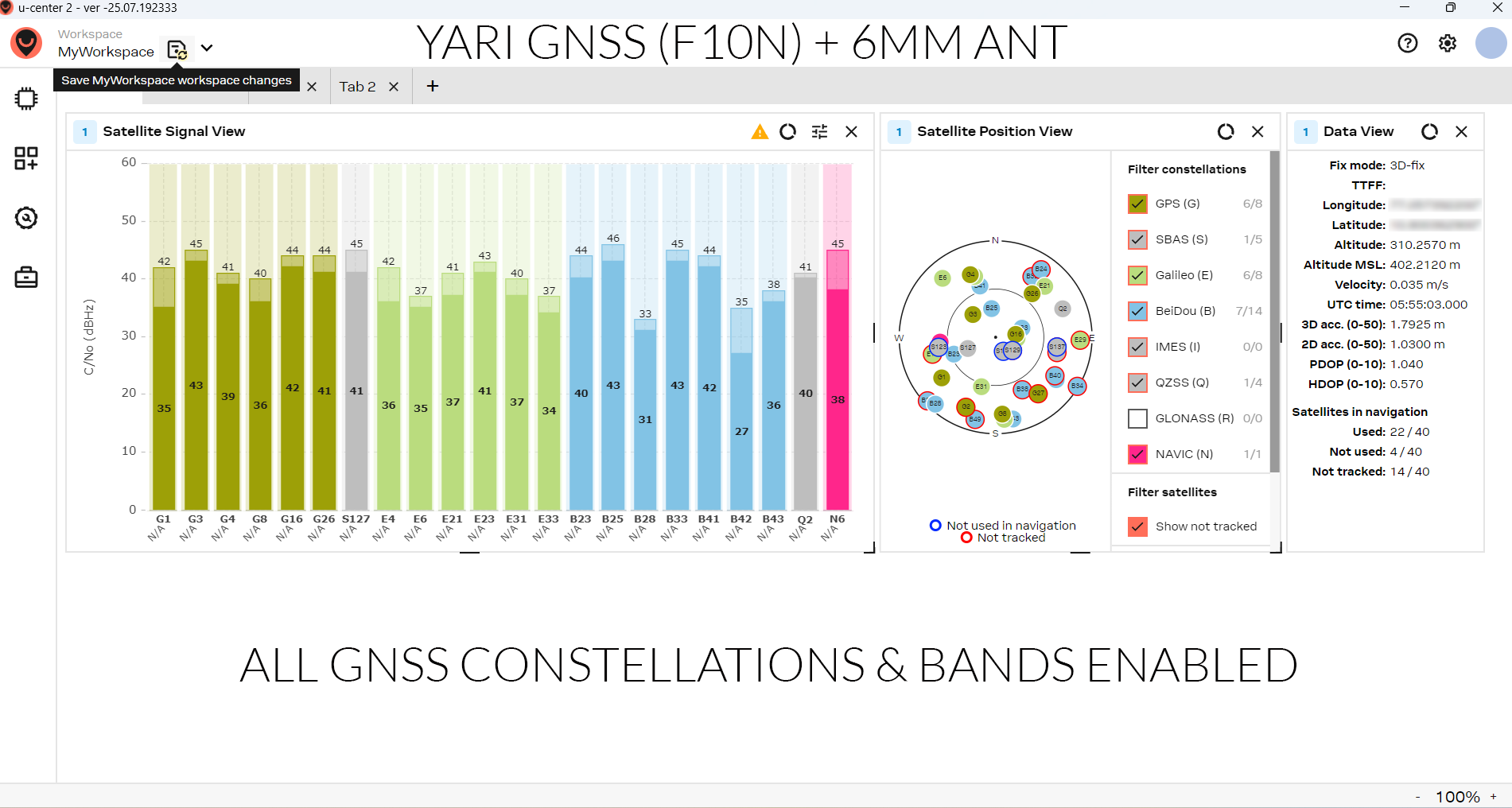
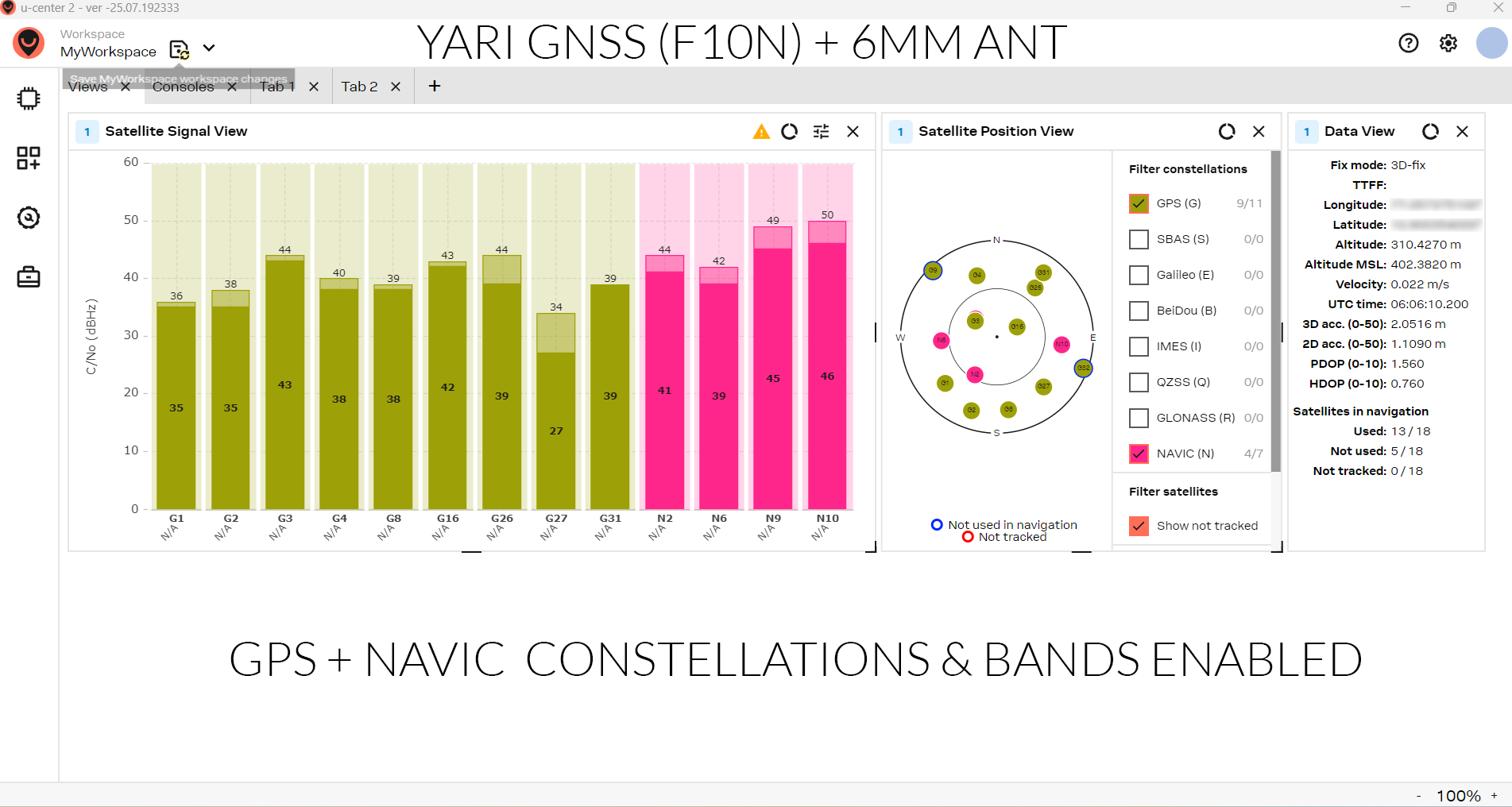
- Positioning performance decreases when running GPS + NAVIC only, compared to using all constellations + both bands.
Dimensions
Interface